Operator Library: Hardware Platform
This operator represents the image data interface between a CLHS Dual Link configuration camera and VisualApplets. This operator receives data from the CLHS Dual Link configuration camera and feeds it into the image processing application.
| Available for Hardware Platform |
|---|
| marathon VF2 |
The operator uses both resources of type camera exclusively. More camera resources cannot be used in the applet.
The operator provides image data on its output port O. This output port is always present.
In addition to this standard output port, you can specify various optional ports if required by your design.
The CLHS protocoll supports pulses and GPIO messages.
During instantiation of the operator, a pop-up dialog appears:
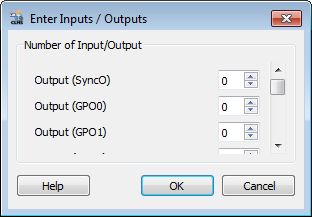
Here, you can define the availability of up to 16 optional GPIs (General Purpose Inputs) and up to 16 optional GPOs (General Purpose Outputs).
In addition, you can activate one output port Output (SyncO) (MultiFGSync bit of video message).
If you set the port availability to "0" (default), the port will not be present in the operator. If you set the port availability to 1, the particular port is available at the operator interface.
The GPIO state is transferred when the state of a GPI is changed by a connected operator. When the operator receives a GPIO message from the camera, all GPOs are updated.
GPIO messages are only exchanged on channel 0. On channel 1 there is no communication of this kind.
Parameter Bit Width can be set to a value higher or lower than the bit width the camera is actually sending.
If you select a lower value, the LSB bits of each pixel are cut off, so that only the MSB bits are transferred into the application.
If you select a higher value, the original pixel is set to the MSB position of the outgoing pixel. The LSB bits are filled with zeros.
In both cases, the relative brightness remains the same, i.e., white pixels remain white and dark pixels remain dark.
| Property | 值 |
|---|---|
| Operator Type | M |
| Input Link | GPI0...GPI15 (optional), status of the frame grabber GPOs (exchange via CLHS) |
| Output Links | O, acquisition image data to be used inside VisualApplets GPO0...GPO15 (optional), status of the camera GPOs (exchange via CLHS) SyncO, MultiFGSync bit is set in video package (valid for 1 clock cycle) |
| Link Parameter | Output Link O | Output Link GPO0...GPO15 (optional) | Input Link GPI0...GPI15 (optional) | Output Link SyncO |
|---|---|---|---|---|
| Bit Width | any | 1 | 1 | 1 |
| Arithmetic | unsigned | unsigned | unsigned | unsigned |
| Parallelism | any, see parameter description | 1 | 1 | 1 |
| Kernel Columns | 1 | 1 | 1 | 1 |
| Kernel Rows | 1 | 1 | 1 | 1 |
| Img Protocol | {VALT_IMAGE2D, VALT_LINE1D} | VALT_SIGNAL | VALT_SIGNAL | VALT_SIGNAL |
| Color Format | VAF_GRAY | VAF_GRAY | VAF_GRAY | VAF_GRAY |
| Color Flavor | FL_NONE | FL_NONE | FL_NONE | FL_NONE |
| Max. Img Width | any | 1 | 1 | 1 |
| Max. Img Height | any | 1 | 1 | 1 |
| CameraID | |
|---|---|
| 键入 | static write parameter |
| 默认 | 0 |
| 范围 | 0 |
|
The parameter specifies which camera resource is used. Furthermore, the ID will be used to map camera channels to applet ports. |
|
| PixelFormat | |
|---|---|
| 键入 | static write parameter |
| 默认 | Mono10p |
| 范围 | {Mono8,Mono10p,Mono12p,Mono14p,Mono16,Raw8,Raw10p,Raw12p,Raw14p,Raw16, Raw64, B8, B10p, B12p, B14p, B16, G8, G10p, G12p, G14p, G16, R8, R10p, R12p, R14p, R16, BGR8, BGR10p, BGR12p, BGR14p, BGR16, BGRa8, BGRa10p, BGRa12p, BGRa14p, BGRa16, BayerGR8, BayerGR10p, BayerGR12p,BayerGR14p, BayerGR16, BayerRG8, BayerRG10p, BayerRG12p, BayerRG14p, BayerRG16, BayerGB8, BayerGB10p, BayerGB12p, BayerGB14p, BayerGB16, BayerBG8, BayerBG10p, BayerBG12p, BayerBG14p, BayerBG16} |
|
The parameter specifies the output pixel format. |
|
| AquisitionFormat | |
|---|---|
| 键入 | static write parameter |
| 默认 | Area |
| 范围 | {Area; Linescan} |
|
When this parameter is set to "Area", the first data available is a complete frame. Frames started in the middle will be ignored. Therefor a "Start Of Frame" in the first video message is required. In "linescan" mode, Start/End of Frame will be ignored, since they are set to 0 for linescan cameras. |
|
| MinimalParallelism | |
|---|---|
| 键入 | static read parameter |
| 默认 | 16 |
| 范围 | [1; 1024] |
|
Minimal parallelism for the output link O to be able to transport the maximal bandwidth of the camera without losing data. This value depends on the currently selected design clock frequency. The higher the frequency the lower the parallelism value can become. |
|
| LineSupervision | |
|---|---|
| 键入 | dynamic/static read/write parameter |
| 默认 | off |
| 范围 | {on, off} |
|
Consistent check for lines. Checks if RowIDs following by RowStep steps. Furthermore check for integrity: Start of line (SoL) and End of Line (EoL) must be in the correct order. Missing EoL or SoL will be detected, an error flag is generated and an End of Line is inserted. Missing Lines will be inserted as smaller lines (length depends on parallelism and bitwidth) until 2 following RowIDs are detected and line consistency is guaranteed again. |
|
| RowStep | |
|---|---|
| 键入 | dynamic/static read/write parameter |
| 默认 | 1 |
| 范围 | {1, 65535} |
|
Step between 2 RowIDs. Should be 1 unless a multi-channel camera is used and lines are split amongst links. |
|
| OverflowOccurred | |
|---|---|
| 键入 | dynamic read parameter |
| 默认 | 0 |
| 范围 | [0;1] |
|
This parameter signalizes that the internal FIFO has an overflow. Overflow indicates loss of data and need to be avoided. Possible reasons might be: One link is not sending at all, or the data is received faster than it can be processed by the operator. |
|
